
[논문] QMIX: Monotonic Value Function Factorisation for Deep Multi-Agent Reinforcement Learning
카테고리: Papers
QMIX의 등장까지 흐름을 한번 잡아보면
현실 세계에서는 agent들이 decentralised하게 행동해야 한다. (한 agent는 다른 agent들의 상태를 직접 알 수 없다.)
근데 decentralised하게 학습을 하려니 학습 도중 다른 agent들도 policy가 변해서 환경이 non-stationary해지고, joint action을 고려해야 하니까 joint action space가 지수적으로 커지는 문제가 발생한다.
그러면 centralised하게 학습을 하자
- Global state를 이용해서 안정적으로 학습할 수 있다.
- Joint action value를 다룰 수 있어서 coordination을 배우기 쉽다.
이를 통해 위 문제점을 해결할 수 있다.
이제 centralised하게 학습은 했는데 decentralised하게 실행을 어떻게 하지?
Agent들이 local observation만으로 action을 골라야하는데 centralised \(Q_{tot}\)만 있으니 각자 어떤 action을 선택해야 할지를 모른다.
⇒ QMIX의 등장
\(Q_{tot}\)를 구할 때부터 \(Q_a\)의 단조적인 함수로 구현하자. 각 Agent가 \(Q_a\)를 가장 좋게(greedy) 고르면 \(Q_{tot}\)도 최적이 되게 하자.
0. Abstract
실제 환경에서 Agent들은 decentralized된 방식으로 행동하면서도 행동을 조율할 수 있어야 한다. 하지만 실제 환경은 시뮬레이션이나 실험실 환경처럼 global state information 사용할 수 없고 통신의 제약도 있다. 그렇기 때문에 제약이 없는 환경에서 centralized 방식으로 학습을 하고 decentralized 방식으로 실행하는 것을 원한다. 하지만 decentralized Policy를 추출하는 방법이 모호했다.
이를 해결하기 위해 QMIX라는 새로운 value-based 방법을 제안한다. QMIX는 decentralized policy를 centralized end-to-end method로 학습할 수 있도록 설계가 되었다. QMIX는 각 Agent의 local observation에만 기반한 Value들을 비선형적으로 조합해 joint action-value를 추정한다.
또한 joint action-value가 개별 agent value에 대해 monotonic한 구조를 강제함으로써, off-policy 학습에서 joint action-value의 최대화를 가능하게 하고, centralised Policy와 decentralised Policy 간의 일관성을 보장한다. 즉 agent value가 monotonic하게 증가하는 것이 joint action-value의 증가와 같게 한다.
StarCraft II micromanagement tasks에서 QMIX 평가를 진행했고 기존의 value based multi-agent RL 방법보다 좋은 성능을 보이는 것을 확인했다.
1.Introduction
decentralised policy는 시뮬레이션이나 실험실 환경에서 centralised training으로 학습할 수 있다. centralised 환경에서는 agent들이 global state information을 알 수 있고 통신도 가능하다.
이처럼 Centralised Training with Decentralised Execution(CTDE) 패러다임은 RL 분야에서 많은 주목을 받았다. 하지만 이 접근법을 최적으로 활용하는 방법에는 아직 한계점들이 있다. 그중 하나가 action-value function(Q)를 어떻게 표현하고 사용하는지이다.
Agents의 행동의 효과를 최대화하려면 centralised action-value function \(Q_{tot}\)가 필요하다. 그러나 agent의 수가 많을수록 학습하기 어렵고, 가능하더라도 Decentralised policy로 추출하는 것이 어렵다.
가장 단순한 방법은 centralised action-value function를 잊고 각 Agent가 독립적으로 \({Q_a}\)를 학습한는 것이다. 그러나 이 접근법은 명시적으로 Agent 간의 상호작용을 표현할 수 없고, Agent의 학습이 다른 Agent의 학습 및 exploration에 의해 혼란을 받을 수 있어 수렴하지 않을 수도 있다.
아예 다른 방법으로 COMA처럼 fully centralised state-action value function \(Q_{tot}\)를 학습하고 actor-critic 구조에서 decentralised policy를 최적화하는데 사용할 수도 있다. 하지만 이 방식은 off-policy learning이고 샘플 효율성이 낮고 agent수가 많으면 학습이 어렵다.
이 두 방법 중간에 VDN(Value Decomposition Networks) 방식처럼 centralised이지만 분해 가능한 \(Q_{tot}\)를 학습하는 방법이 있다. \(Q_{tot}\)를 개별 Agent의 observation과 action에 맞는 \(Q_a\)들의 단순 합으로 표현한다. 따라서 각 Agent는 자신의 \(Q_a\)에 따라 greedy하게 action을 선택함으로써 자연스럽게 decentralised policy가 도출된다. 하지만 VDN은 complexity of centralised action-value functions 표현에 한계가 있고 학습 중 사용할 수 있는 추가 상태 정보를 무시한다.
그래서 이 논문은 IQL과 COMA의 중간 지점에 있는 VDN계열인 QMIX를 제안한다. QMIX의 핵심 아이디어는 decentralised policy를 추출하기 위해 VDN 처럼 완전한 분해가 필요하지 않다는 것이다. 대신 \(Q_{tot}\)의 argmax 결과가 각 Agent의 \(Q_a\)에 대한 개별 argmax 결과와 일치하도록 보장하는 것이 필요하다. 이를 위해 아래와 같은 monotonicity constraint를 도입한다.
QMIX는 각 agent 의 \(Q_a\)를 표현하는 에이전트 네트워크와, 이들을 조합하여 \(Q_{tot}\)을 출력하는 mixing network로 구성된다. mixing network는 VDN처럼 단순한 합이 아니라, 복잡한 비선형 방식으로 결합되며, 위의 단조성 조건을 만족시키기 위해 가중치를 양수로 제한한다. 결과적으로 QMIX는 centralised Q-function을 복잡하게 표현할 수 있고 decentralised policy로 쉽게 전환 가능한 구조를 가지고 agent 수에 따라 잘 확장이 가능하다.
4. QMIX
위에서 언급한 것 처럼 QMIX는 VDN계열이지만 VDN처럼 전체 Q값을 단순히 개별 Q값의 합으로 분해할 필요는 없다. 대신 아래 조건만 만족하면 centralised policy와 같게 decentralised policy를 만들 수 있다.
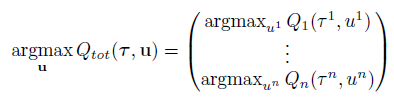
global Q-function의 argmax가 개별 Q-function argmax와 동일하면, agent는 자신의 Q값만 보고 greedy하게 action을 선택하면 된다.
위를 만족하기 위해서는 Monotonicity가 항상 만족해야한다. 즉, QMIX는 \(Q_{tot}\)이 각 \(Q_{a}\)에 대해 단조적으로 증가하게 한다.
이를 만족시키기 위한 QMIX의 아키텍처는 다음과 같다.
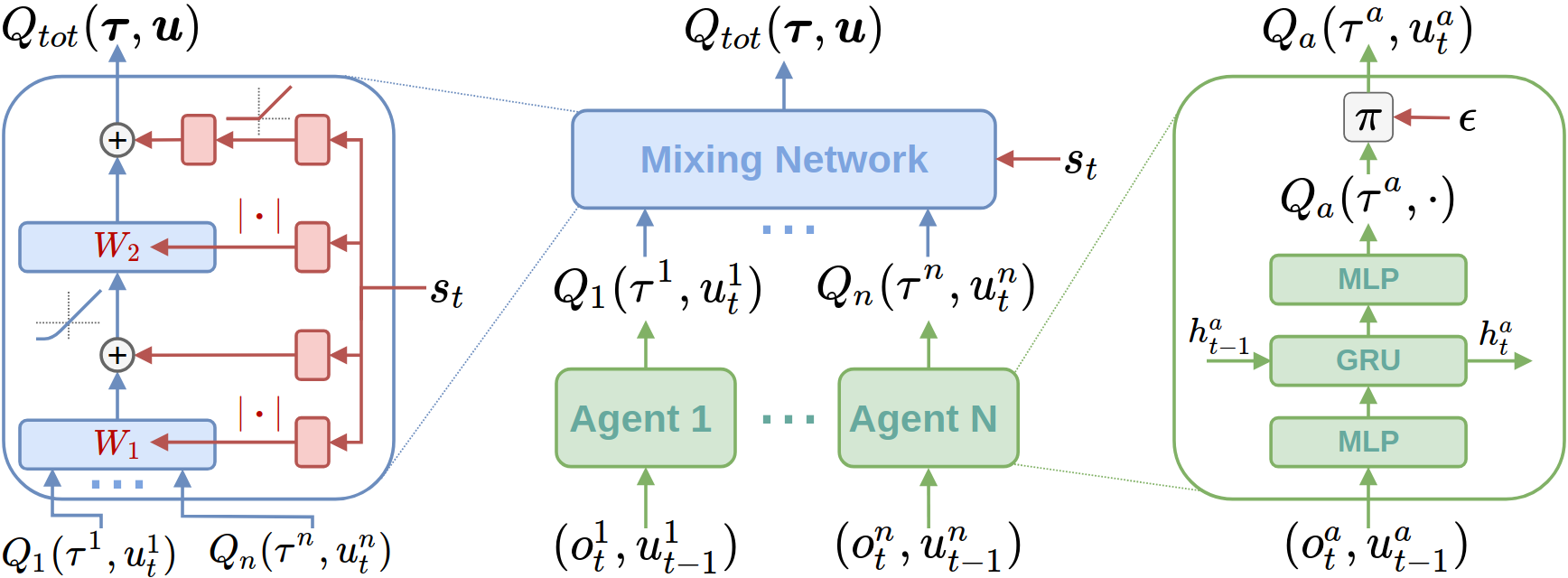
QMIX 아키텍처 구성
- Agent Networks
- 각 Agent는 자신의 Q값 \(Q_a(\tau^a, u_t^a)\)를 추정한다. (\(\tau\) : history)
- 입력: 현재 observation \(o^a_t\), 이전 action \(u^a_{t-1}\)
- partial observability이기 때문에 DRQN 형태로 구현한다.
- Mixing Network
- 개별 Agent Q값들을 입력으로 monotonic하게 조합해 \(Q_{tot}(\tau, u)\)를 구한다.
- Feedforward 구조이며, Weight는 양수로 제한하고, bias는 제한하지 않는다.
- mixing network가 어떤 monotonic function이라도 근사할 수 있다
- Hypernetworks
- 전체 state \(s_t\)를 입력으로 받아 Mixing Network의 Weight와 bias를 생성한다.
- weight는 linear layer + absolute activation function
- 마지막 bias는 layer 2개 + ReLU 사용
QMIX는 아래 손실 함수를 최소화하게 end-to-end로 학습한다. DQN의 손실 함수와 형태가 비슷하다.
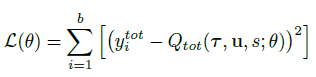

- b : batch size
- \(\theta^−\) : Target network parameter
4.1 Representational Complexity
QMIX가 표현할 수 있는 value function의 범위는, fully observable 환경에서 각 agent의 value function을 비선형적이면서 monotonic 한 방식으로 결합할 수 있는 모든 형태를 포함한다.
VDN이 표현할 수 있는 선형 monotonic value function보다 범위가 넓다.
하지만 앞서 설정한 monotonic 제약으로 인해서 이러한 방식으로 factorize 할 수 없는 value function은 QMIX로는 표현할 수 없다.
직관적으로 어떤 Agent의 best action이 다른 Agent의 현재 행동에 직접적으로 의존하는 경우, 그 value function은 제대로 factorize할 수 없고, 따라서 QMIX가 정확히 표현할 수 없다.
하지만 QMIX는 VDN보다 복잡한 value function을 더 정확하게 근사할 수 있고 extra state information도 더 잘 활용할 수 있다.
5. Two-Step 게임 (Two-Step Game)
VDN과 QMIX의 representational complexity effect를 설명하기 위해 두 agent에 대한 two-step game을 진행한다.
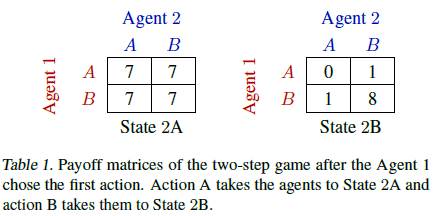
- 1단계에서는 Agent 1이 다음 단계에서 어떤 매트릭스 게임을 플레이할지 선택한다. 이때 Agent 2의 행동은 아무런 영향을 미치지 않는다.
- 2단계에서는, 두 Agent 모두 행동을 선택하고 Table 1의 보상 매트릭스에 따라 gloabl reward를 받는다.
VDN과 QMIX를 각각 5000 에피소드, epsilon = 1로 최종 학습된 value function을 분석한다.
epsilon=1로 하면 환경이나 exploration 부족이 아닌 진짜 모델의 성능으로만 결과가 달라진다.
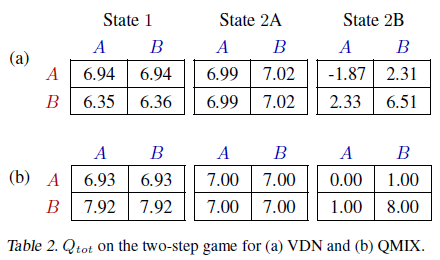
QMIX는 higher representational capacity을 통해 joint-action value function을 정확하게 표현할 수 있었던 반면 VDN은 그렇지 못했다. (VDN : suboptimal strategy, QMIX : optimal strategy)
6. Experimental Setup
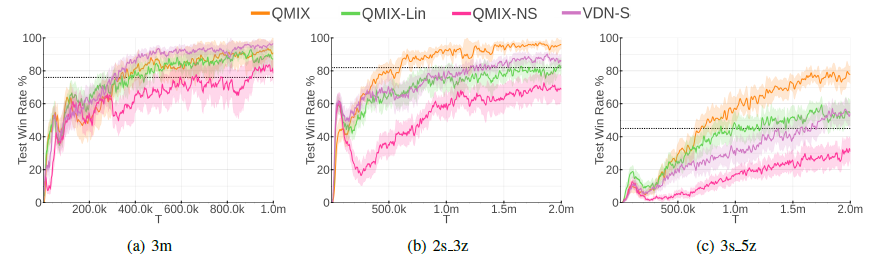
6.2. Ablations
extra state information의 추가와 비선형적 변형의 필요성에 대해 분석하기 위해 ablation experiments을 진행한다.
먼저 hypernetwork 없는 QMIX와 비교를 통해 mixing network에서 extra state information의 중요성을 분석한다.
- QMIX-NS
- hypernetwork 없이 학습 → mixing network가 extra state information를 받지 않음
- Weight는 절댓값을 취해 monotonicity constraint을 유지
mixing network의 non-linearity가 필요한지를 알아보기 위해 mixing network의 hidden layer를 제거했다.
- QMIX-Lin
- mixing network에서 hidden layer 제거 → 완전 선형 구조
- 결국 state s를 받아서 weighted sum을 수행하는 VDN의 확장 형태
non-linear mixing과 state information 둘 중 무엇의 사용이 더 중요한지를 비교했다.
- VDN-S
- VDN에 state-dependent term 추가
- single hidden layer 32개와 ReLU를 사용하는 네트워크에서 state-dependent term을 생성
non-learning heuristic based algorithm
- dashed line
- 전체 정보를 관측 가능
- 가장 가까운 적을 공격 → 그 적이 죽으면 다음 적을 공격
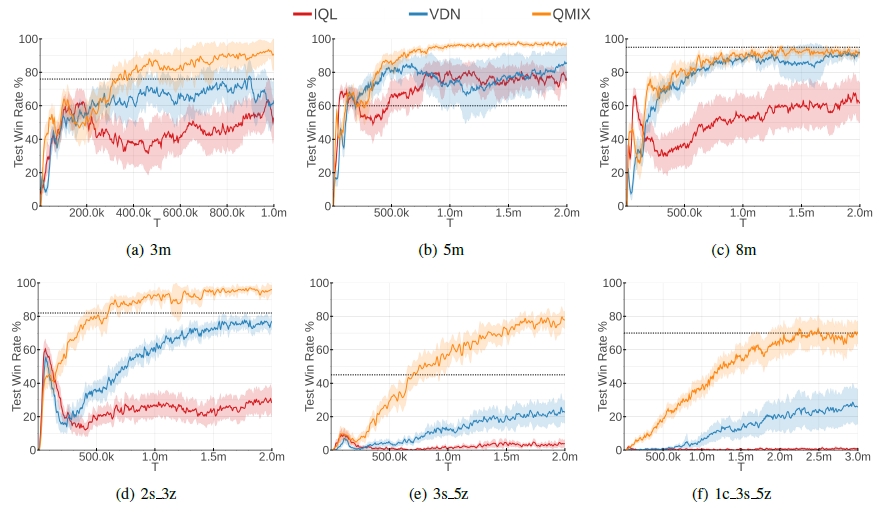
7. Results
8. Conclusion
QMIX라는 새로운 deep multi-agent RL 방법을 제시한다.
QMIX는 centralised 환경에서 decentralised policy를 end-to-end 학습할 수 있고, 학습 중 사용 가능한 extra state information을 효율적으로 활용한다.
extra state information은 agent가 직접 볼 수 없는 정보로 mixing network의 weight/bias를 만드는데 사용한다. 이를 통해 단순히 \(Q_a\)를 더하는게 아니라 상태에 따라 Q값을 조절해 더한다. 더 정확한 joint Q-value를 학습할 수 있다.
QMIX는 joint action-value function을 학습할 수 있게 하고 이를 agent 각각의 action-value functions으로 분해할 수 있게 한다. 이것은 mixing 네트워크에 monotonicity constraint을 통해 가능하게 했다.
StarCraft II의 decentralised unit micromanagement tasks에서 QMIX는 기존의 덜 정교한 분해 구조를 사용하는 value-based multi-agent methods들과 independent Q-learning보다 좋은 성능을 보인다.
댓글남기기